GAME101笔记汇总
19.Cameras,Lenses and Light Fields
19.1 Camera

相机或眼睛用类似凸透镜的成像本质和小孔类似,但相比于小孔成像,透镜能聚焦更多光子
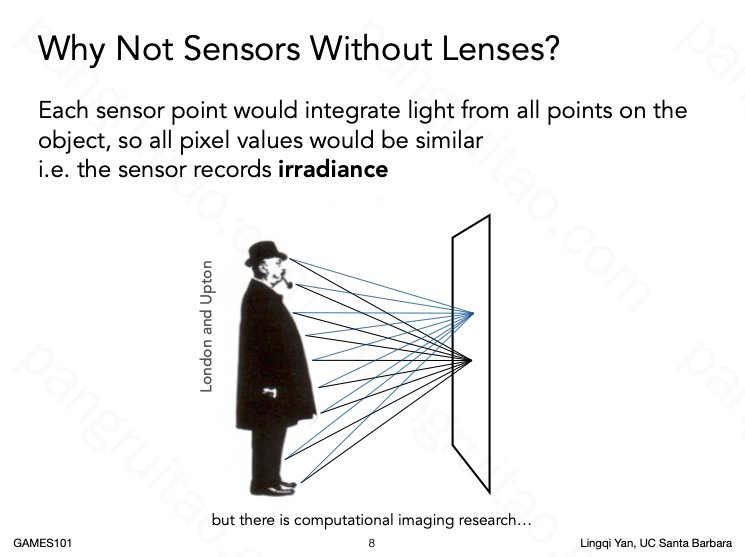
相机的感光元件记录的是 Irradiance,因此必须要有小孔或者透镜,否则会直接糊掉
小孔成像虽然光子少但是效果也不一定差
19.2 Field of View
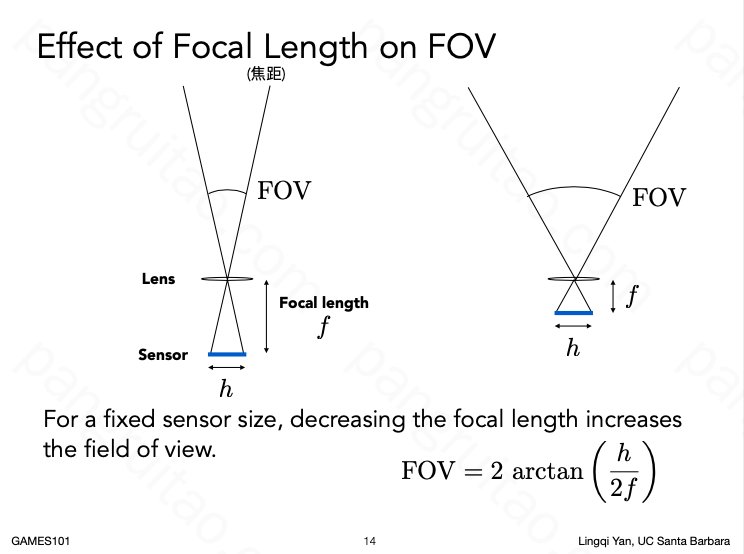
同样大小的感光片情况下,焦距越小,视角越大
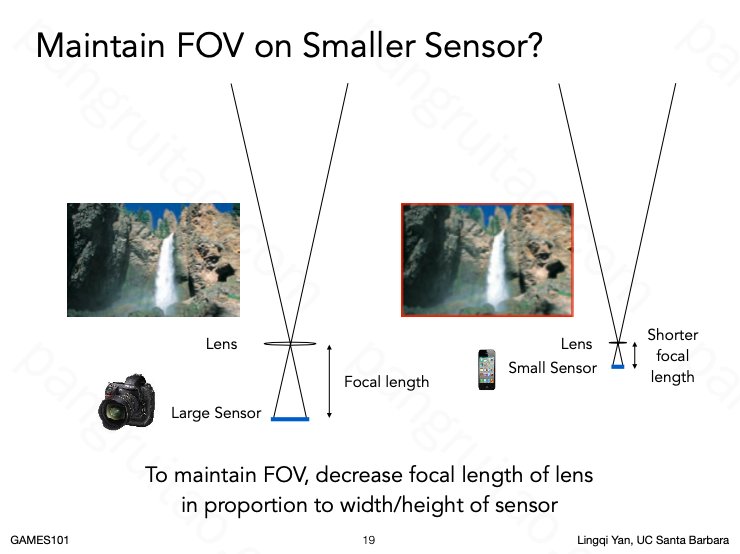
同样的焦距下,感光片越大视角越大
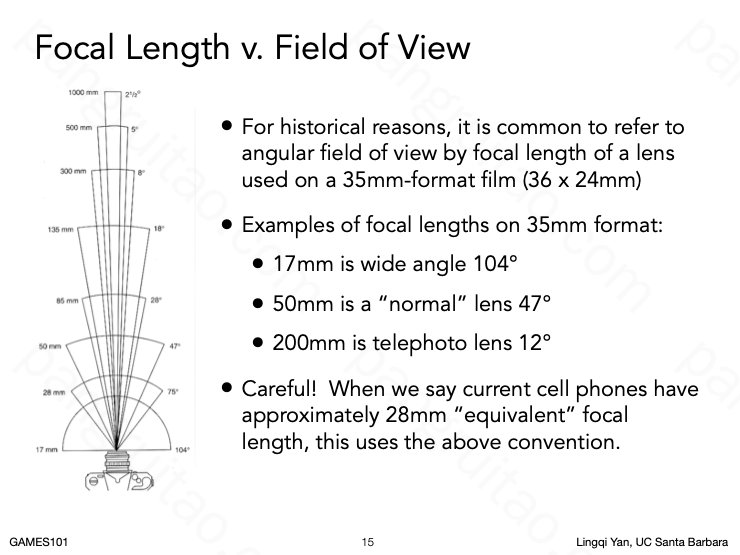
相机焦距和视角的关系(且统一使用36*24mm的底片为计算标准,非标准底片需要相应折算)
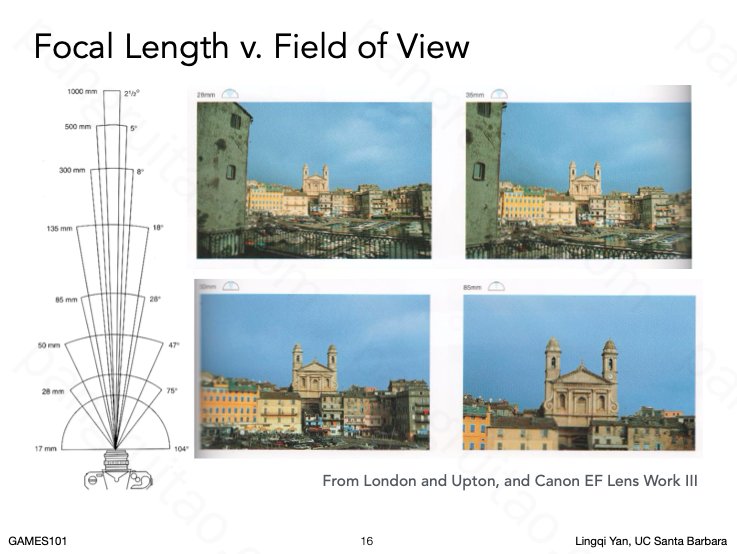
这是调焦距可以调整画面“远近”的原因,但并非真实的“远近”,和把相机放近后拍照得到的透视关系有区别

感光器的大小区别
19.3 Exposure
显然,每个感光元件在一次曝光情况下接受的能量=时间*irradiance
通常有三种方式可以调整曝光度:光圈大小、快门速度、ISO
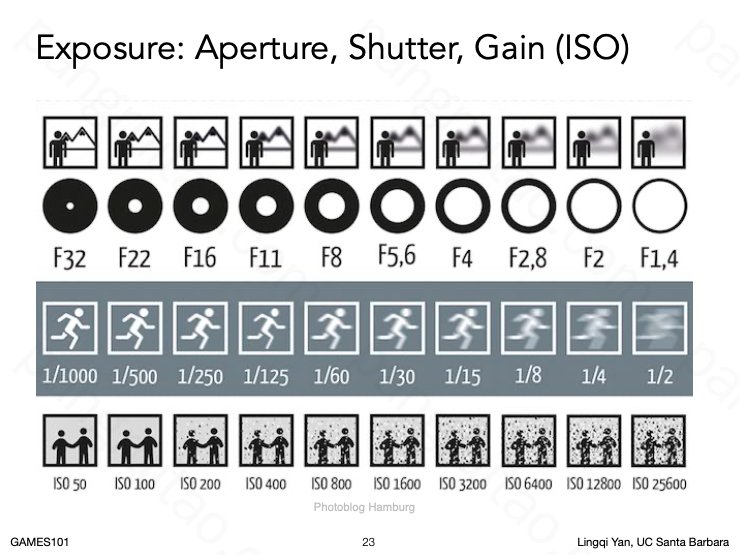
用这三种方式调整会有各自的特征和利弊
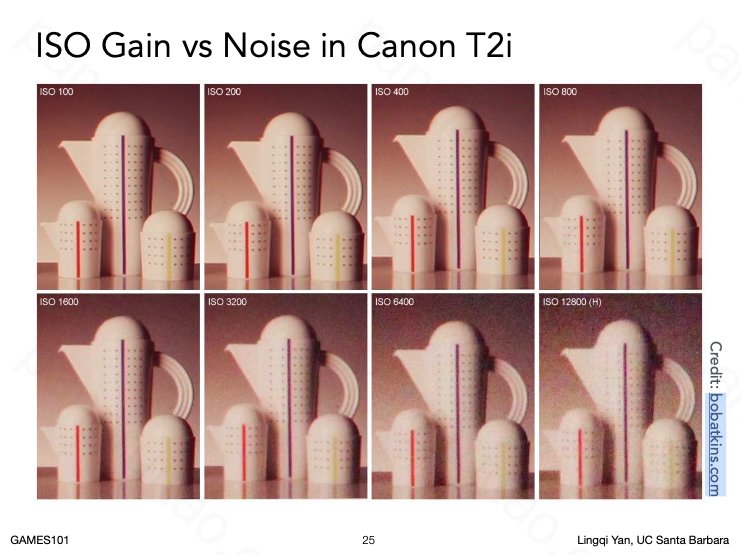
ISO 由于是直接对数据进行放大,自然也会放大噪声。所以通常不倾向采用这种调整方式

调整光圈大小,且通常用 FN 来表示,其中 N 和光圈直径呈反比
调整光圈还会影响景深效果:光圈越小精深效果越弱。恰如近视眼虚眼看东西会清晰一些的原理
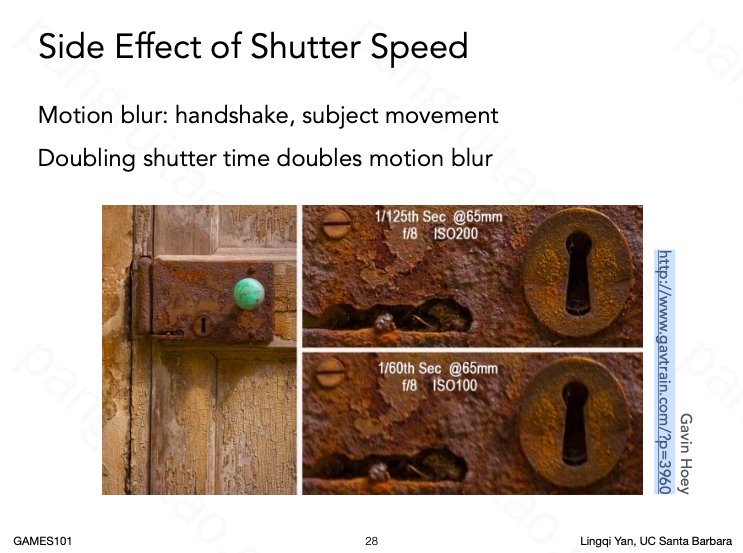
快门速度可能导致运动模糊
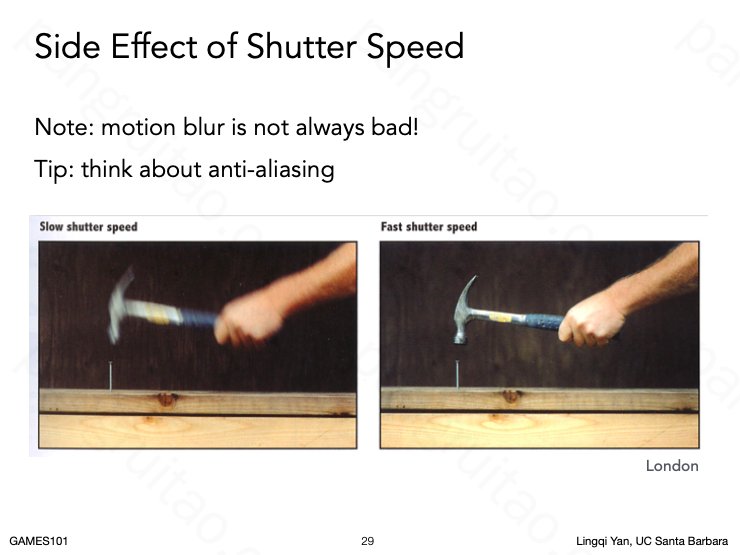
但运动模糊并不一定不好,很多时候反而是有更好,比如电影和游戏
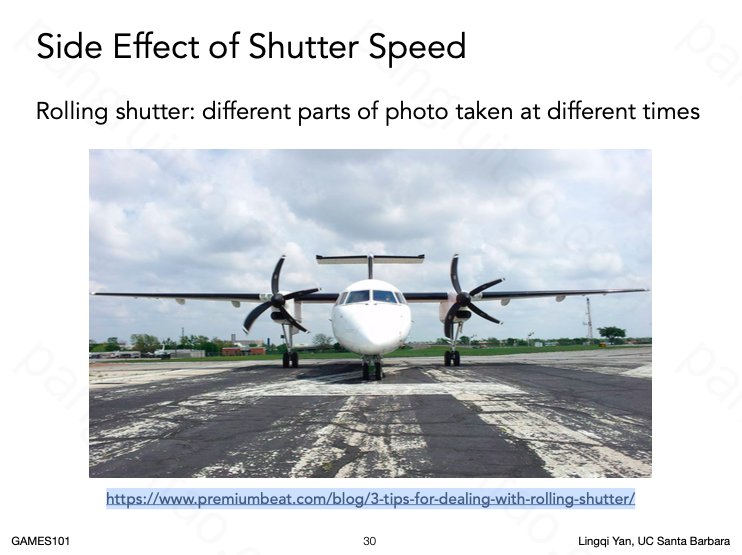
快门由于是机械式,开关有一个过程,所以拍摄高速物体时可能产生畸变
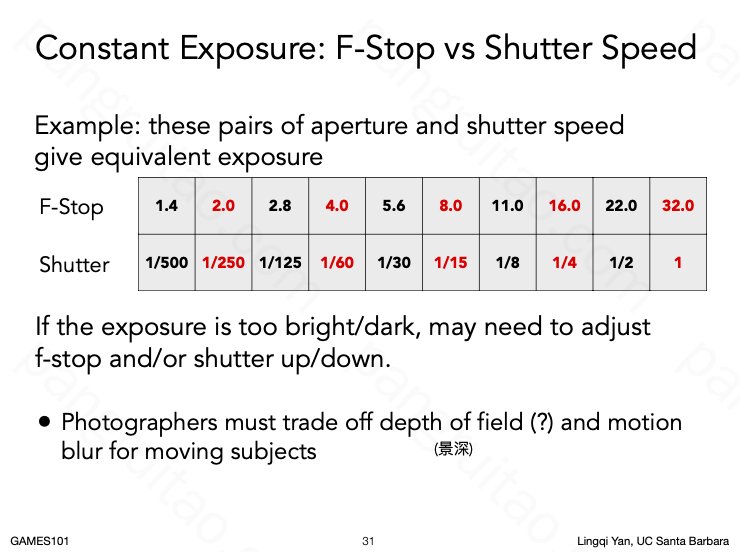
为达到相同的曝光度,在不调整 ISO 的情况下需要相反地调整快门速度和光圈
所以可能要么牺牲一些景深,要么产生一些运动模糊,需要在这两者间根据照片目标效果进行平衡取舍
19.4 Fast and Slow Photography
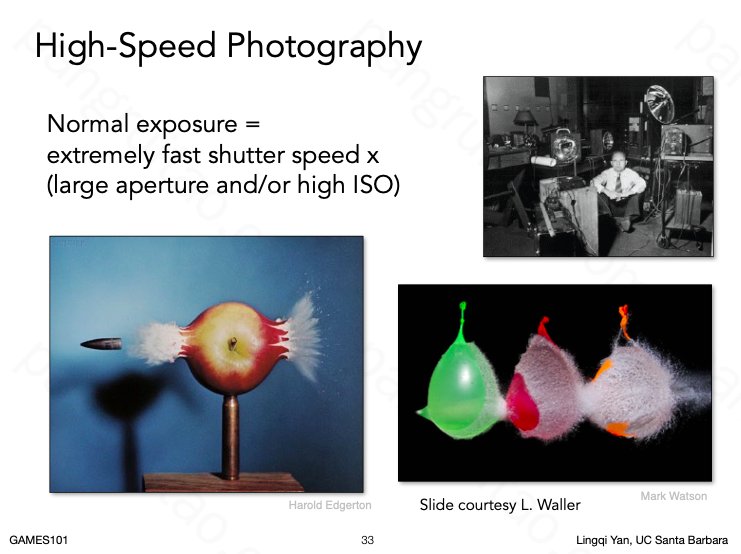
极高的快门速度,于是一般需要配合极大的光圈或者高 ISO

长曝光效果
19.5 Thin Lens Approximation

在实际工业界,由于很多场景下空间不可能达到焦距要求的长度,通常使用多个镜片组合模拟出单凸透镜的效果。
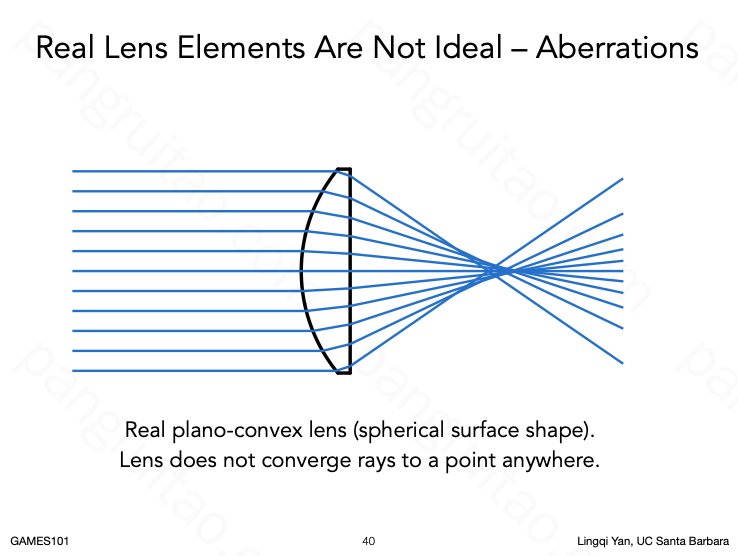
事实上很多情况下镜片聚焦也不在一个点上
但我们通常只考虑最理想的透镜
19.6 Defocus Blur
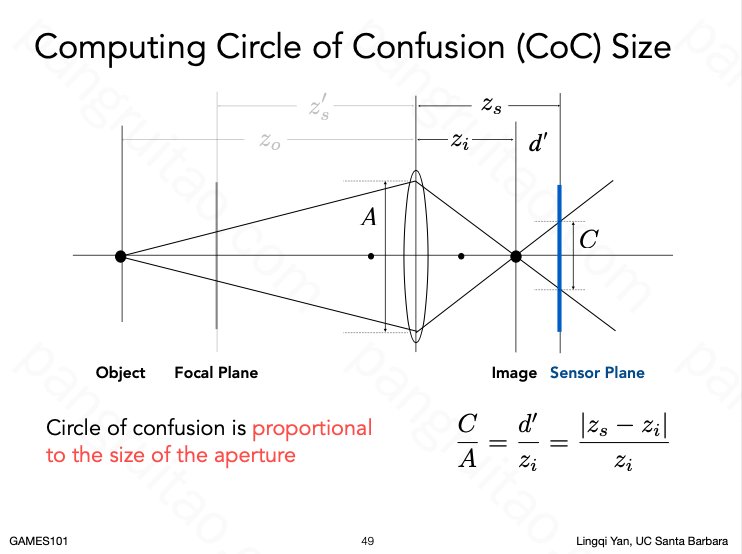
失焦模糊的原理。并由此产生景深

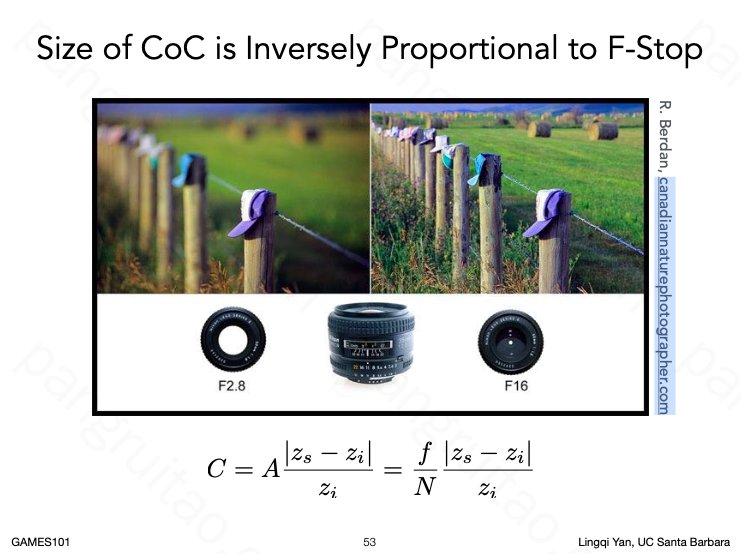
光圈大小对于景深的影响
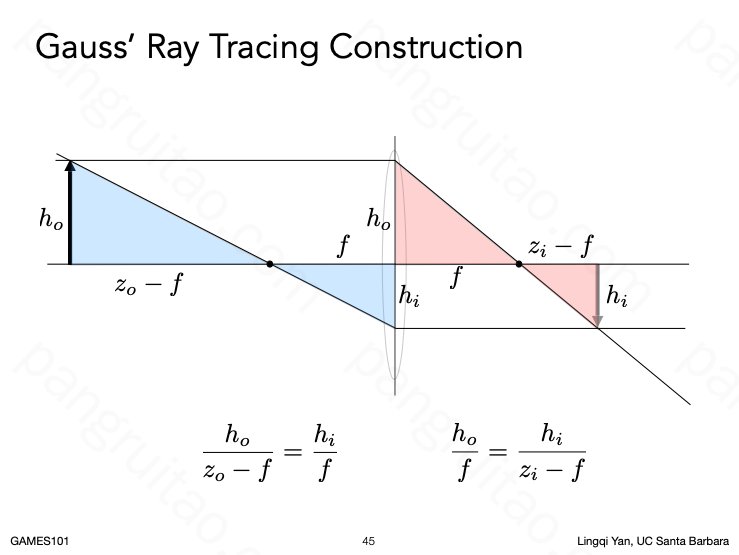
19.7 Ray Tracing Ideal Thin Lenses
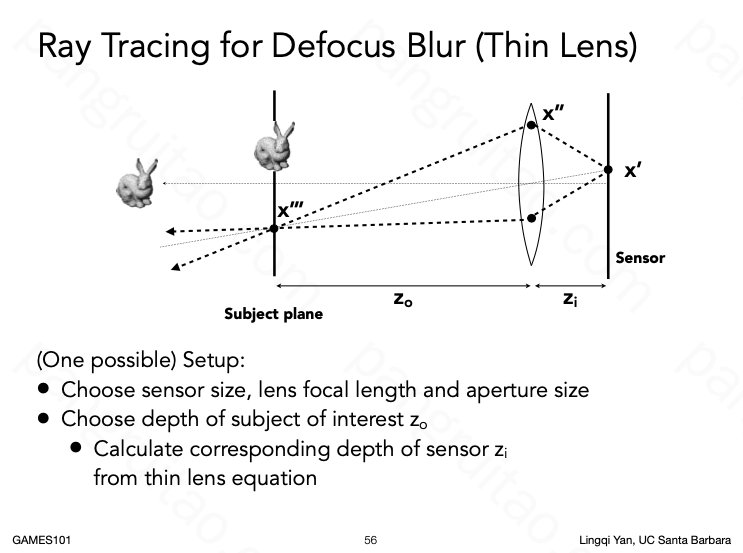
由此在渲染中也可以根据这样的性质,主动建模出一个透镜和感光片(用以代替普通光线追踪的小孔成像模型)

并渲染出带景深效果的渲染图

由于实际的相机是有像素是离散的,可以如上考虑一个像素大小的景深模糊情况。
20.Color and Perception
20.1 Light Field

我们看到场景是因为场景有光发射向我们的眼睛
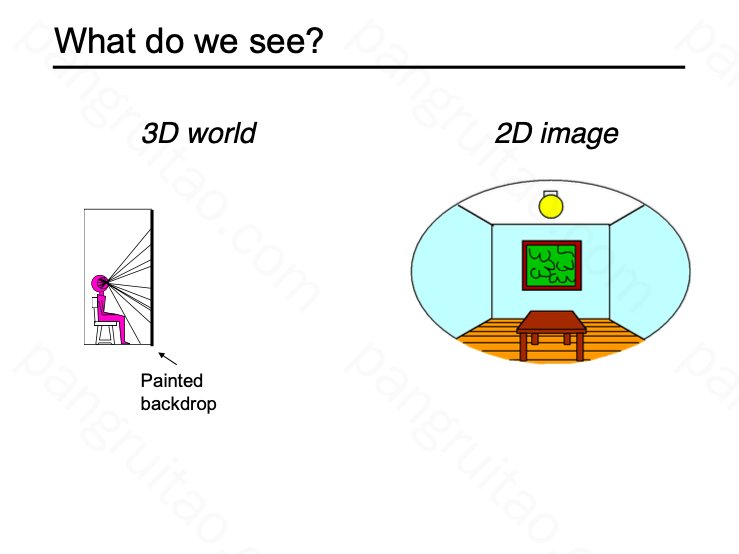
但如果一个屏幕能够模拟屏幕后方所有光矢,则理应让我们无法分辨真假,真裸眼3D
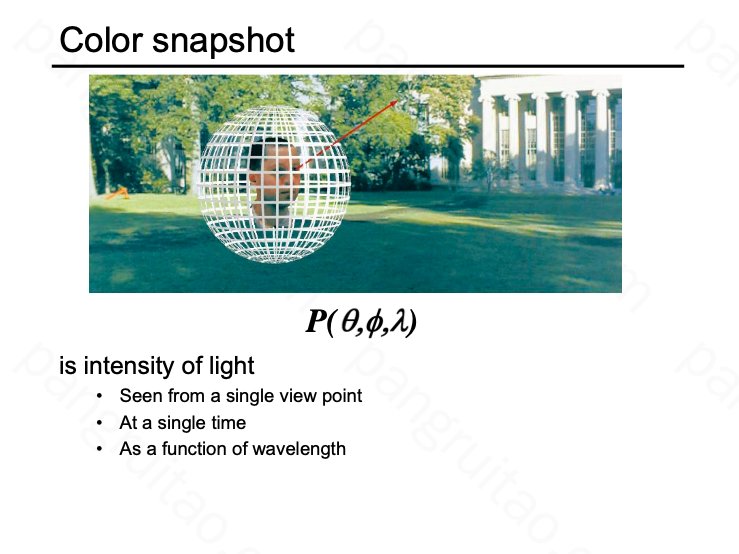
记录一个点在一个时刻的广场,需要三个参数:
- 两维记录视角
- 一维记录波长
最后用函数记录这个视角下这个波长的光的能量
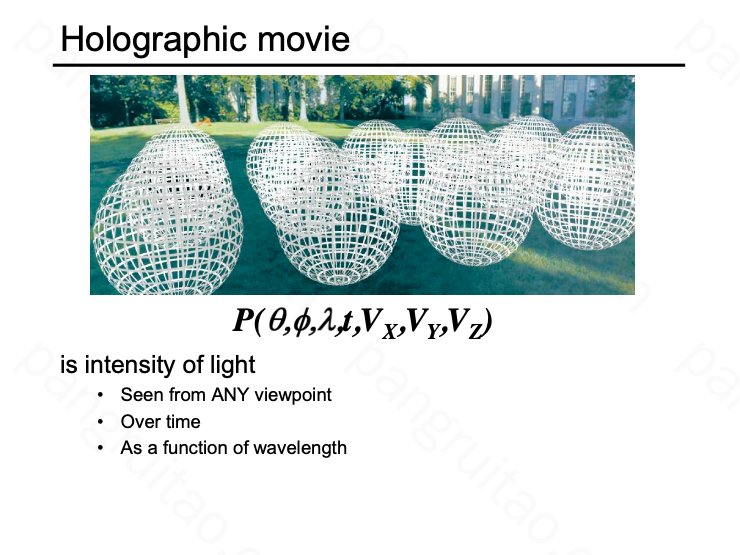
如果要记录全时全局的广场,则需要额外再增加一维时间,和三维坐标,一共七维进行记录
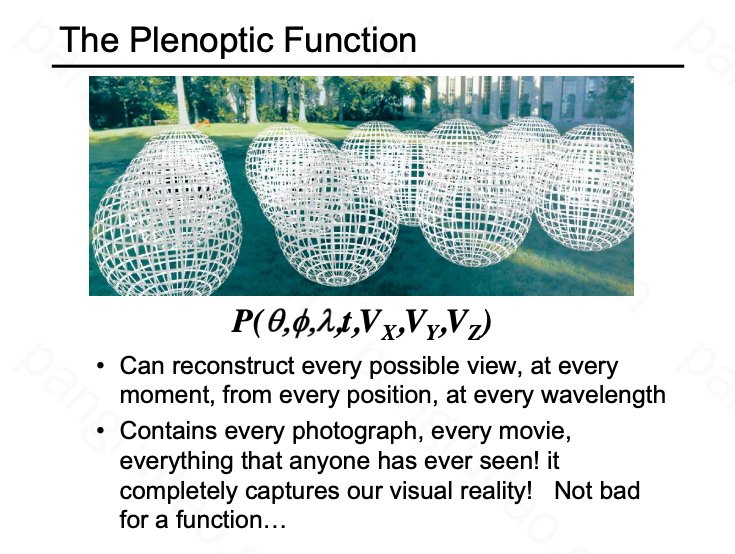
有了它我们可以重建任意画面

如果对于一个有限的区域,则只需要一个盒子,和盒子上每一点的光场信息即可复刻
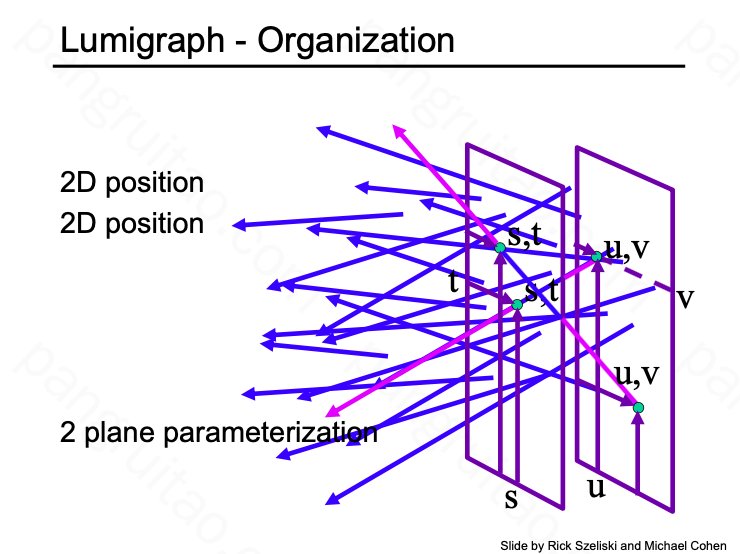
为此一种痛常的做法是用两个平面,记录单平面光场,不考虑时间和光波长的话,刚好是4维
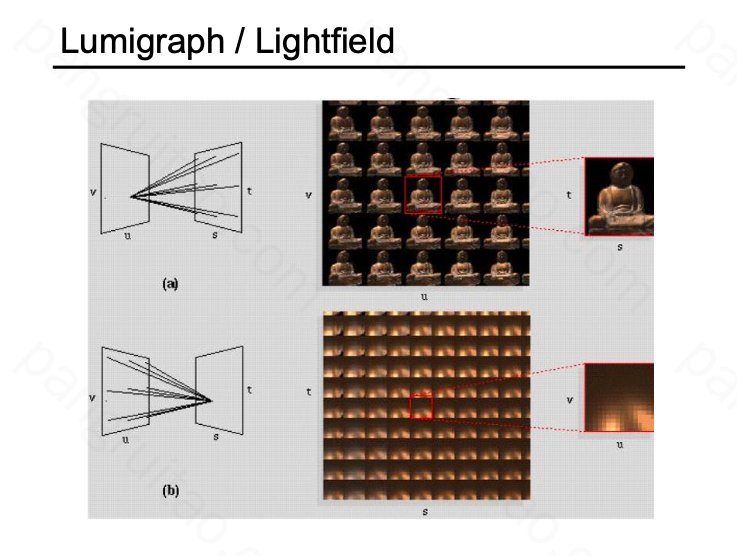
这是一个光场采样的实例
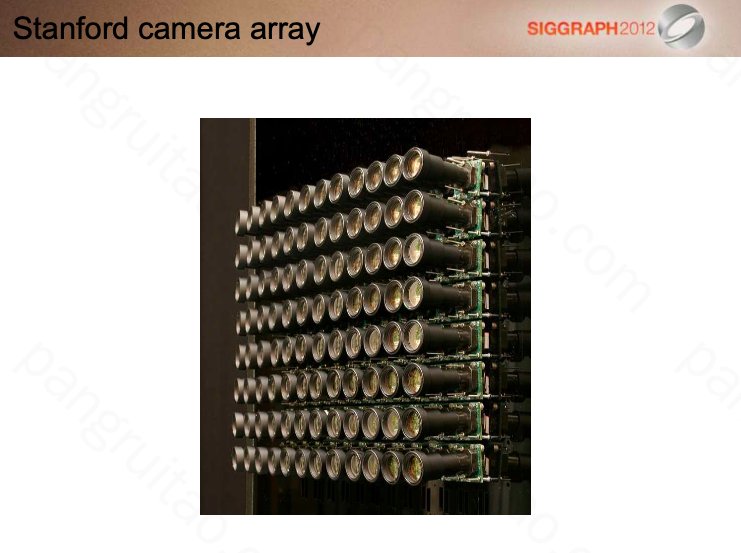
斯坦福的光场采集阵列
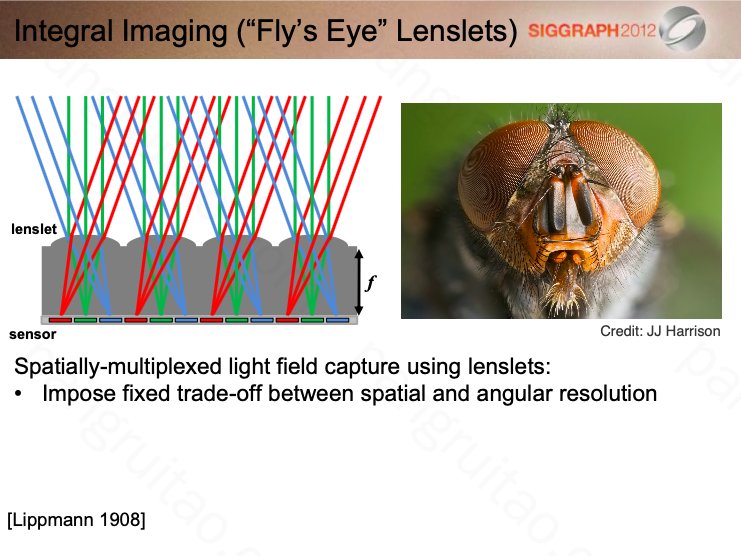
生物的复眼,本质也是一个光场相机
20.2 Light Field Camera
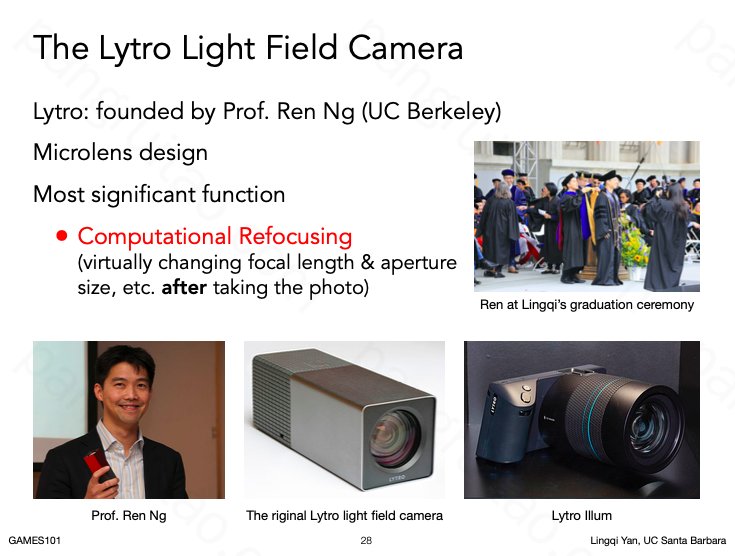
已经商业化量产的光场相机
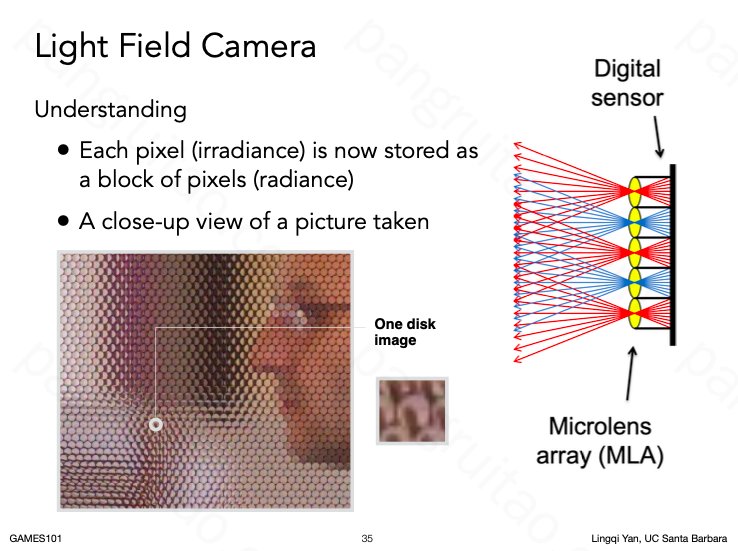
光场相机的每个像素都是一个相机
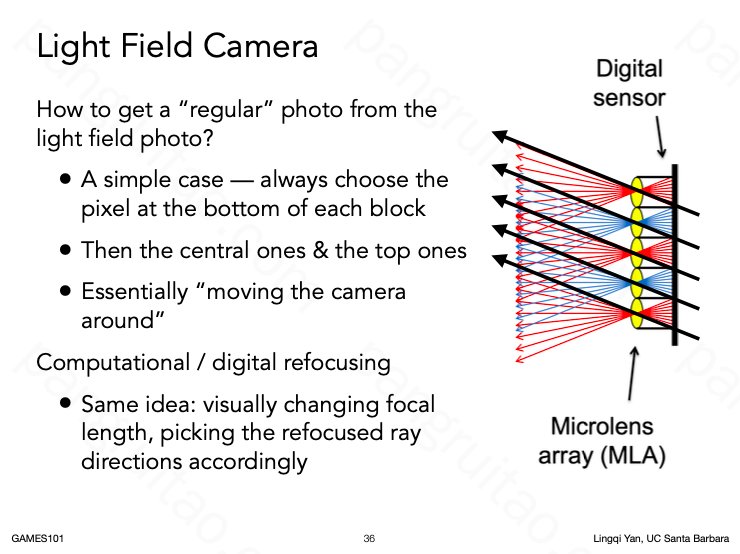
如果我们只想用光场相机拍一张普通照片,则统一取一个方向的光即可
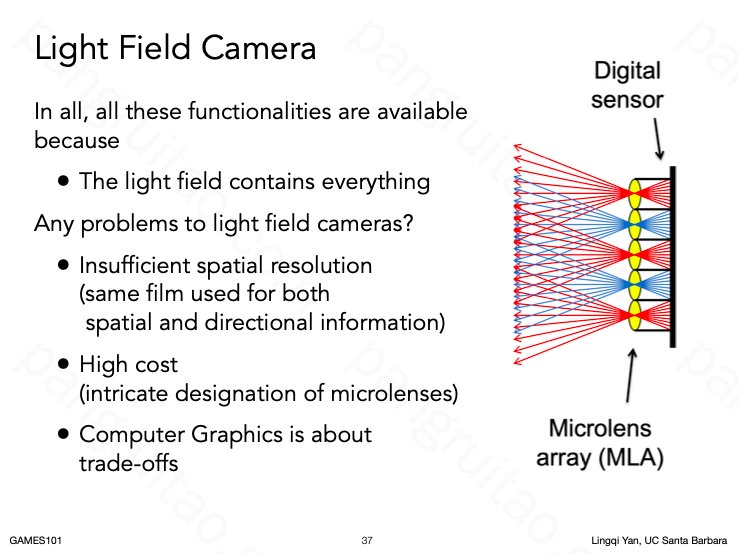
当然,光场相机如此牛逼的表现下,也是有极大的代价的
20.3 Physical Basis of Color
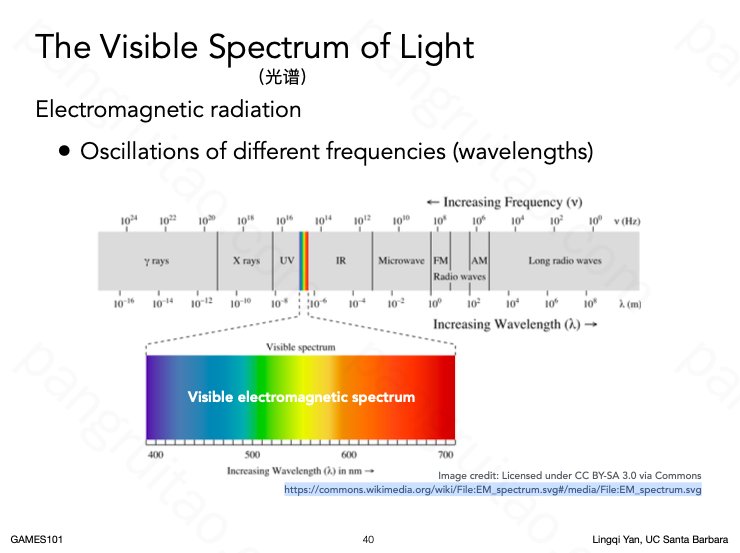
可见光的光谱
可以用谱功率密度记录一时刻一束光的性质
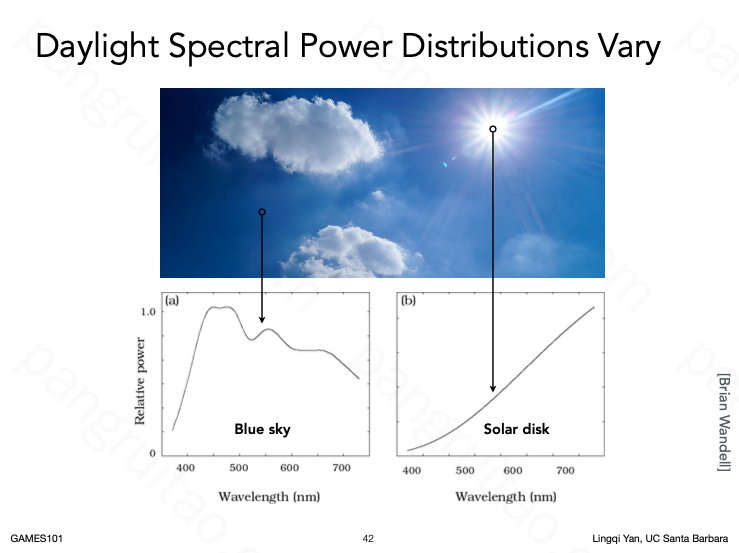
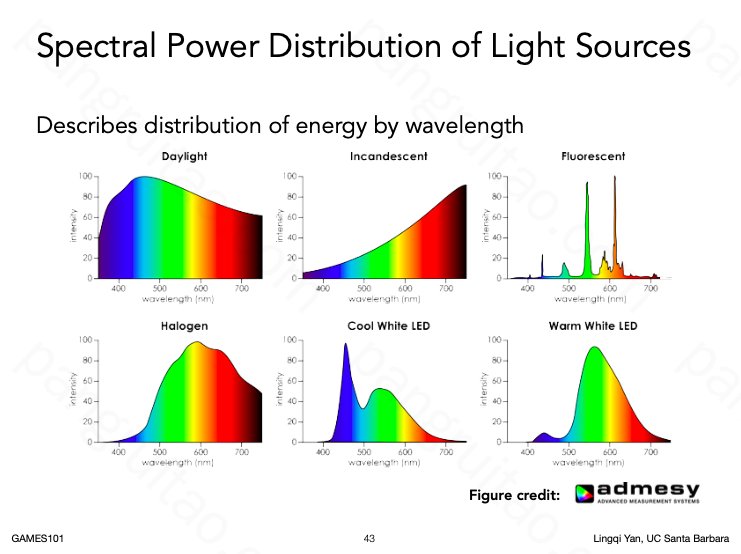
一些常见的光源的谱功率密度分布
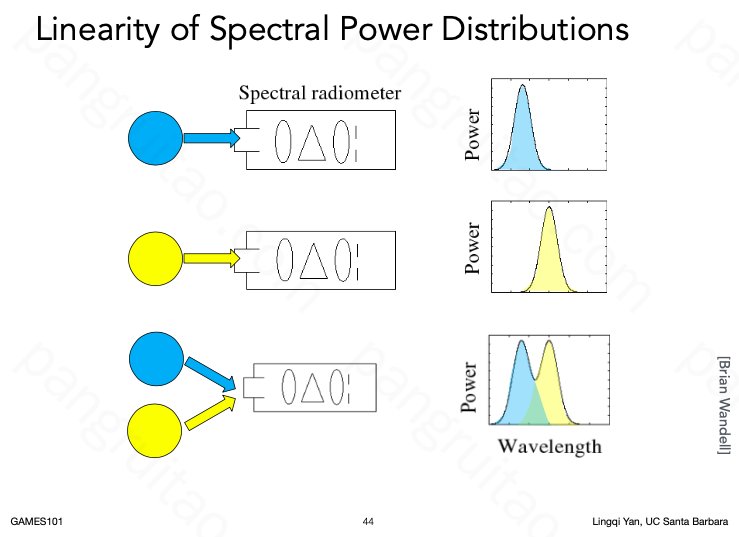
且光是可以线性组合的
而颜色只是我们的感知,物理世界并不存在颜色的概念
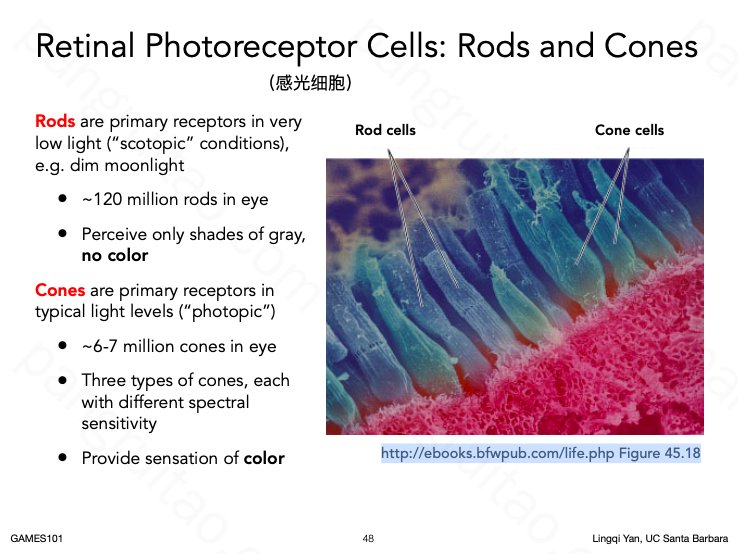
20.4 Biological Basis of Color
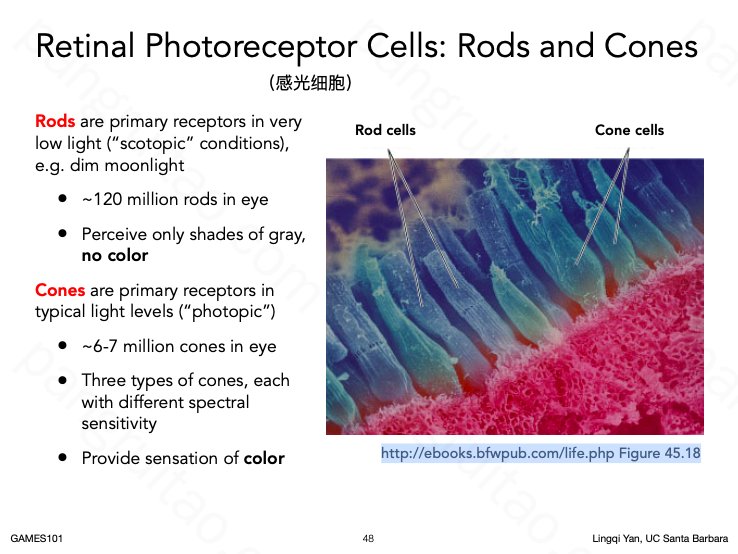
人眼中的视杆细胞和视锥细胞
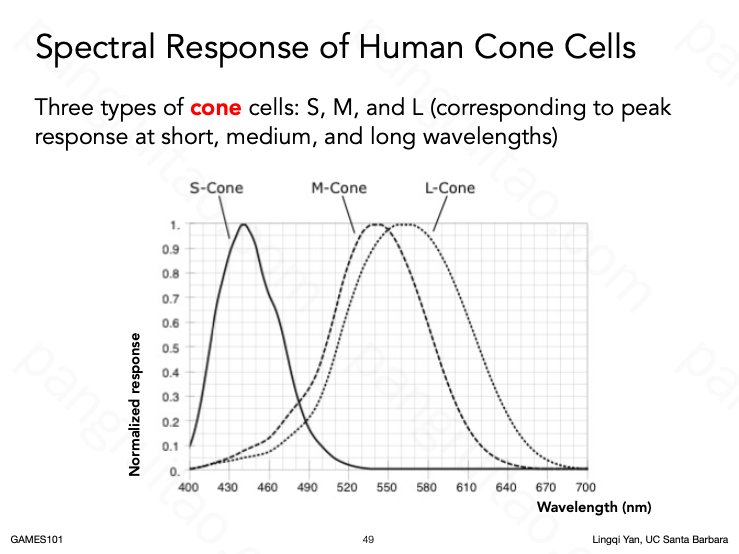
三种视锥细胞对光波频率的响应曲线
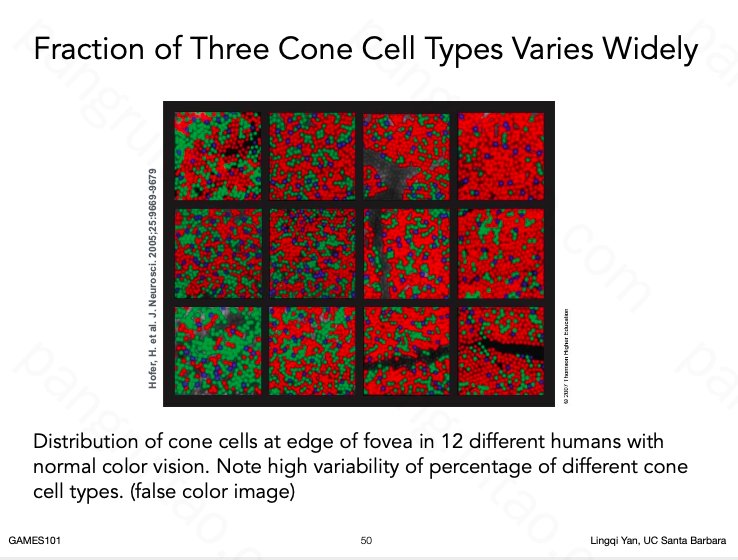
很神奇的一点是事实上每个人眼中的三种细胞的分布差异极大
每个人看到世界的感觉极大可能并不相同
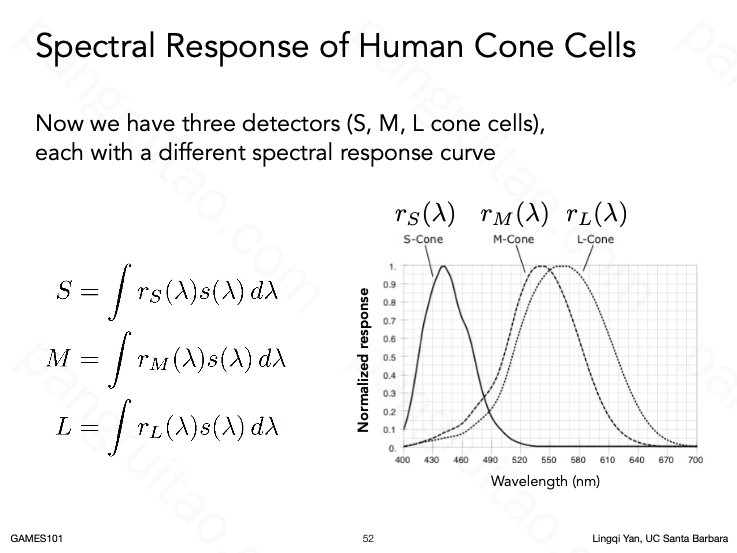
视锥细胞响应光波的计算方式

大脑视觉感知的数据就仅仅来自于这些细胞的有限的处理后的信息
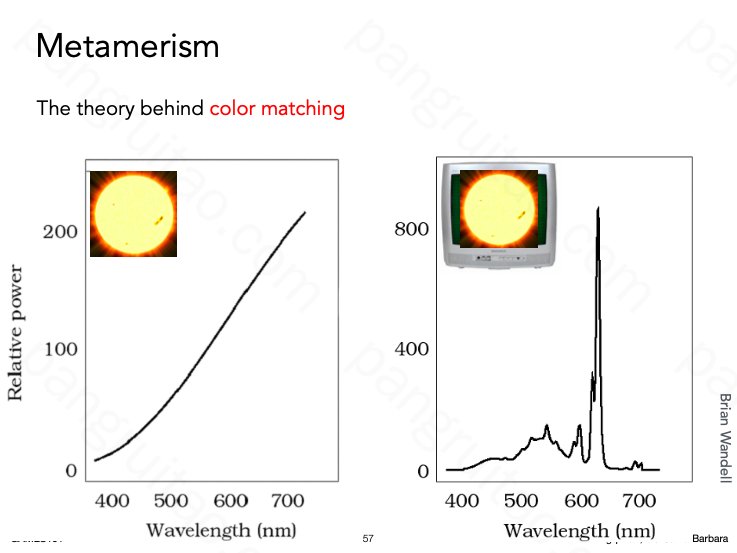
20.5 Metamerism

由于大脑接受到的是视细胞处理后的信号,相对于无穷维的光谱,大脑能接受的仅三维信号。所以是有信息缺失的。
比如大脑就无法分辨如图的几种广谱,看起来都是一种颜色
也是因为这样,显示器调色也只是调出感觉上较一致的光谱,而远非实际的光谱。
20.6 Color Reproduction or Matching

找实验人员来混合 RGB 使其和单光源的光看起来接近
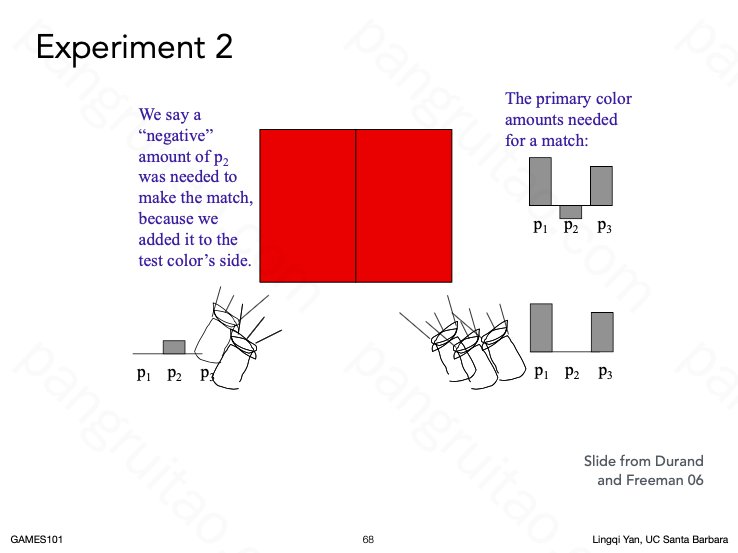
但有的时候,靠 RGB 加和,是达不到目标光源的效果的,有可能需要对光源进行补光
这是则会导致 RGB 中产生负值分量
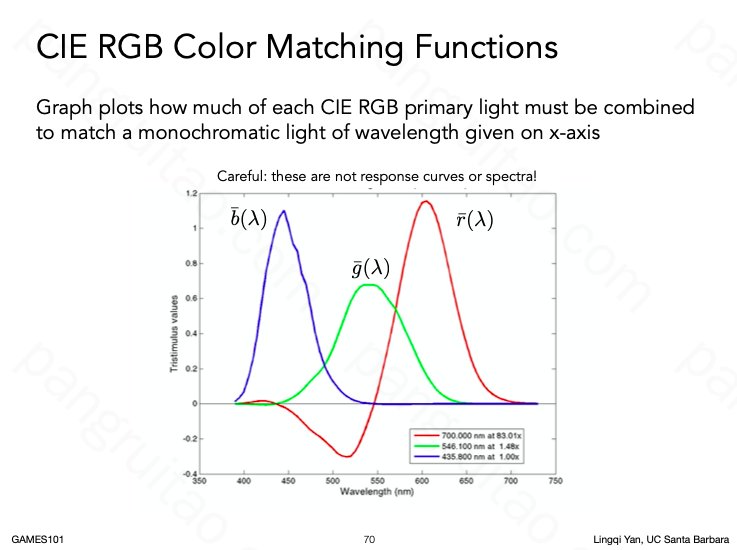
负值分量在单色光谱谱配中,红色是比较明显的
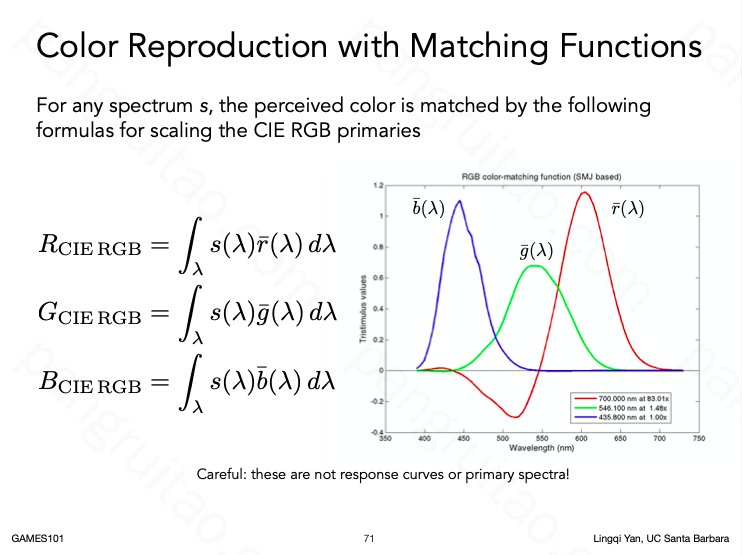
所以,在 CIE 颜色匹配系统中,采用的是这样的匹配方式
20.7 Color Spaces
我们通常常用的颜色空间 sRGB
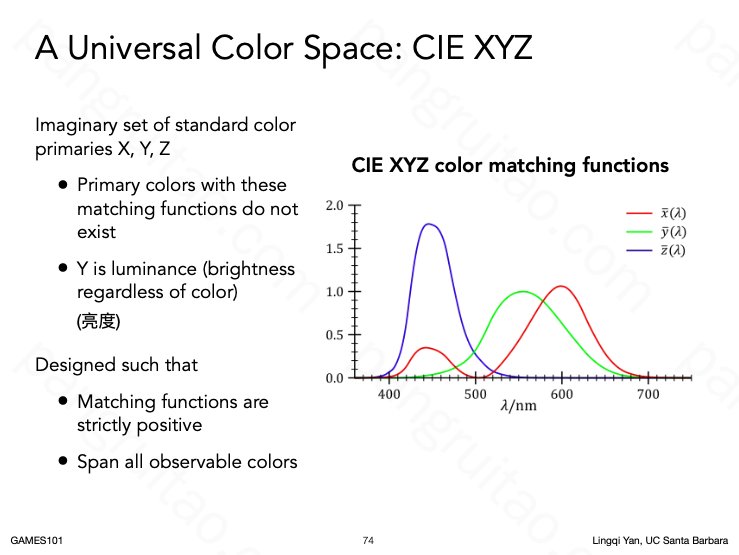
科学界常用的人造颜色空间 CIE XYZ
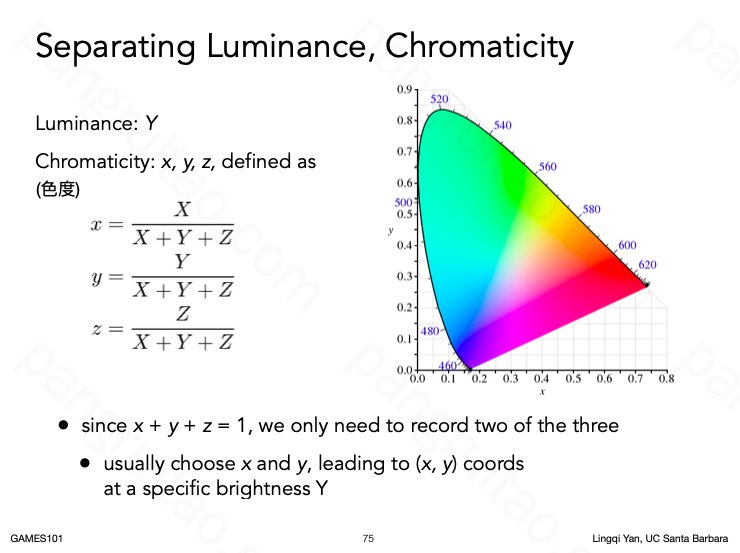
将 XYZ 归一化后可以减少一维,展示出其实际颜色空间
单一波长光对应的坐标分布在边沿(但粉红边不对应自然中的单波光)
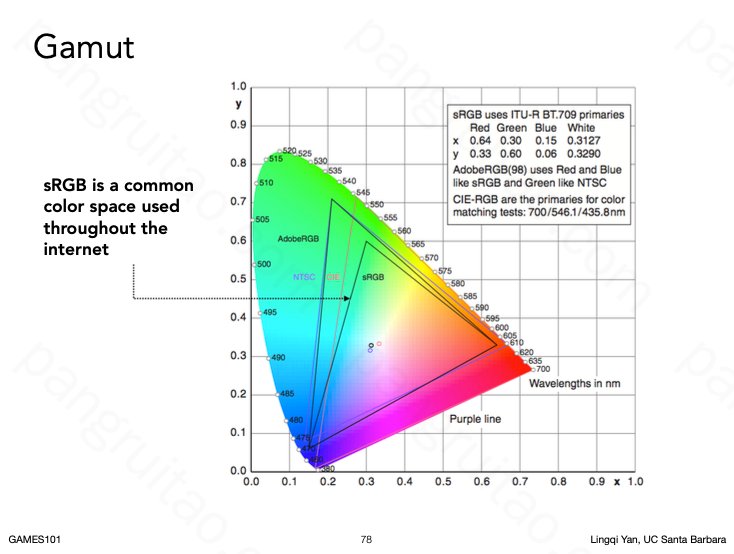
其他一些系统的色域则位于中间的一部分
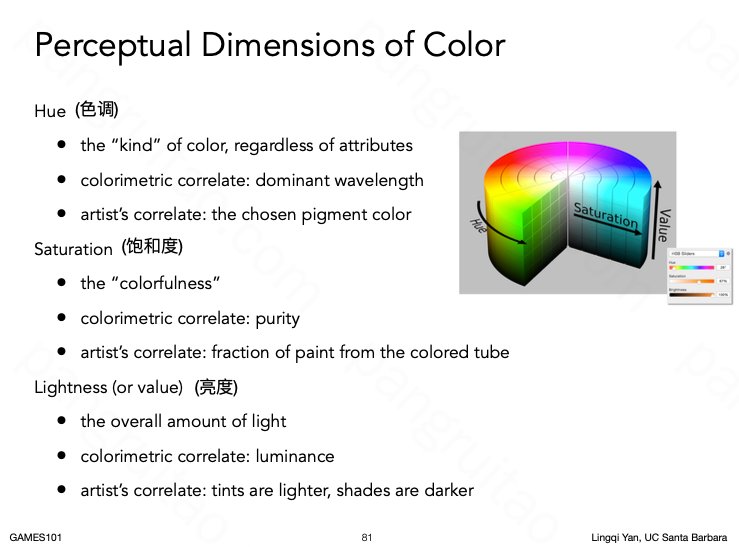
HSV 颜色空间,由于比较直观,在美术工作中比较常用
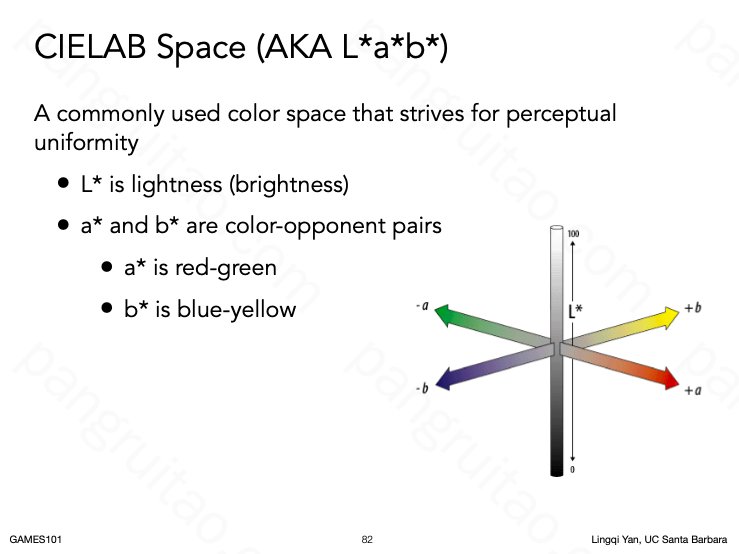
CIELAB 颜色空间,用三组互补色确立三维颜色空间
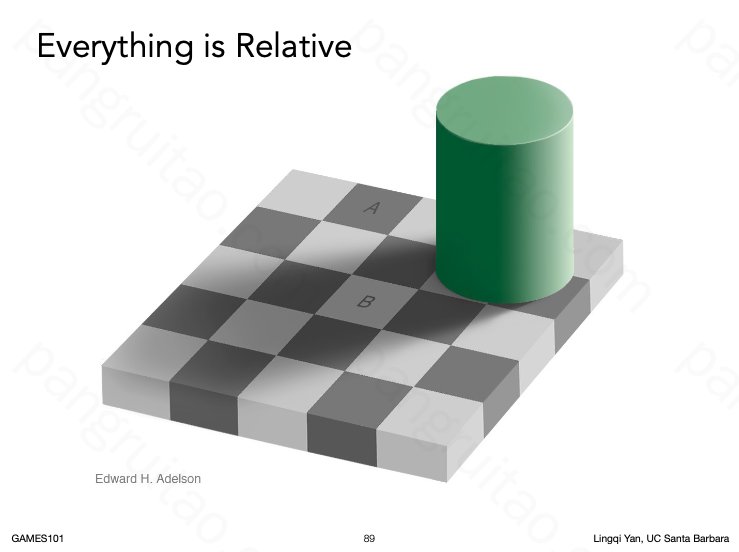
颜色是相对的,是感知的实例(视觉白平衡,和蓝金衣服是一个原理)
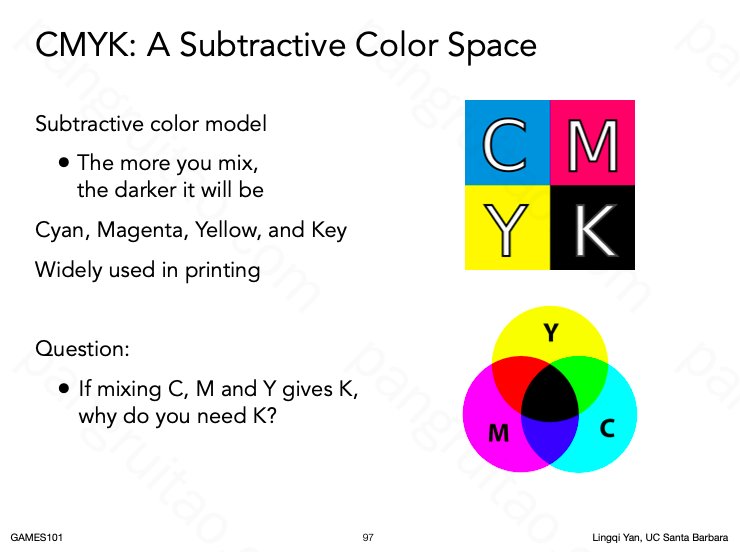
打印用的减色颜色空间
理论上只用品红、蓝、黄即可,黑色可以由这三个颜色混合而成。但实际为了节省颜料费用,会单独使用黑色颜料(黑色颜料使用量大,且便宜)。